Nosová křivka popisuje vztah mezi činným výkonem dodávaným do elektrické zátěže a napětím na zátěži v energetické elektrizační soustavě za konstantního účiníku .[ 1] [ 2] křivky (podobný parabole položené na boku) je definován základními elektrickými rovnicemi. Křivka je důležitá pro analýzu stability napětí , protože souřadnice "špičky nosu" definují maximální výkon, který můžeme vedením přenést.
Rovnice a řešení
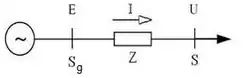
Schéma vedení elektrizační soustavy Předpokládejme harmonické symetrické zatížení třífázového vedení, modelovaného danou impedancí
Z
{\displaystyle \mathbf {Z} }
harmonické napětí v napájecím bodě, pak dle 2. Kirchhoffova zákona pro fázory sdružených napětí
E
{\displaystyle \mathbf {E} }
U
{\displaystyle \mathbf {U} }
proudu
I
{\displaystyle \mathbf {I} }
E
−
U
=
3
Z
I
{\displaystyle \mathbf {E} -\mathbf {U} ={\sqrt {3}}\mathbf {\ Z\ I} }
a po roznásobení výše uvedené rovnice činitelem
3
I
∗
{\displaystyle {\sqrt {3}}\mathbf {I} ^{\mathbf {*} }}
výkonovou bilanci:
S
g
−
S
=
3
Z
I
2
{\displaystyle \mathbf {S} _{g}-\mathbf {S} =3\mathbf {\ Z\ } I^{2}}
tj.:
|
S
g
−
S
|
=
3
|
Z
|
I
2
{\displaystyle \left|\mathbf {S} _{g}-\mathbf {S} \right|=3\mathbf {\ } \left|\mathbf {Z} \right|\mathbf {\ } I^{2}}
tj. pro
Z
2
=
R
2
+
X
2
{\displaystyle Z^{2}=R^{2}+X^{2}}
S
2
=
P
2
+
Q
2
{\displaystyle S^{2}=P^{2}+Q^{2}}
S
g
2
−
S
2
−
2
(
3
I
2
(
R
P
+
X
Q
)
)
=
(
3
I
2
)
2
Z
2
{\displaystyle S_{g}^{2}-S^{2}-2(3I^{2}(RP+XQ))=\left(3I^{2}\right)^{2}Z^{2}}
a po roznásobení výše uvedené rovnice převrácenou hodnotou činitele
3
I
2
{\displaystyle 3I^{2}}
E
2
−
U
2
−
2
(
R
P
+
X
Q
)
=
Z
2
S
2
U
2
{\displaystyle E^{2}-U^{2}-2(RP+XQ)=Z^{2}{\frac {S^{2}}{U^{2}}}}
a po dalším roznásobení výše uvedené rovnice činitelem
−
U
2
{\displaystyle -U^{2}}
U
4
−
2
(
1
2
E
2
−
(
R
P
+
X
Q
)
)
U
2
=
−
Z
2
S
2
{\displaystyle U^{4}-2\ ({\frac {1}{2}}E^{2}-(RP+XQ))\ U^{2}=-Z^{2}S^{2}}
tj. pro
α
=
1
2
E
2
−
(
R
P
+
X
Q
)
{\displaystyle \alpha ={\frac {1}{2}}E^{2}-(RP+XQ)}
β
=
Z
2
S
2
{\displaystyle \beta =Z^{2}S^{2}}
f
(
U
)
≡
U
4
−
2
α
U
2
+
β
=
0
{\displaystyle f(U)\equiv U^{4}-2\alpha \ U^{2}+\beta =0}
tj.:
U
4
−
2
α
U
2
+
α
2
−
α
2
+
β
=
0
{\displaystyle U^{4}-2\alpha \ U^{2}+\alpha ^{2}-\alpha ^{2}+\beta =0}
tj.:
(
U
2
−
α
)
2
=
α
2
−
β
{\displaystyle \left(U^{2}-\alpha \right)^{2}=\alpha ^{2}-\beta }
Položením derivace funkce
f
{\displaystyle f}
U
0
{\displaystyle U_{0}}
P
0
{\displaystyle P_{0}}
d
f
d
U
=
4
U
3
−
4
α
U
=
0
⇒
U
0
2
=
α
{\displaystyle {\frac {df}{dU}}=4U^{3}-4\alpha \ U=0\ \ \ \ \ \Rightarrow \ \ \ \ \ U_{0}^{2}=\alpha }
pro které platí:
α
2
−
2
α
2
+
β
=
0
⇒
α
2
=
β
{\displaystyle \alpha ^{2}-2\alpha ^{2}+\ \beta =0\ \ \ \ \ \Rightarrow \ \ \ \ \ \alpha ^{2}=\beta }
tj.:
1
4
E
4
−
E
2
(
R
P
0
+
X
Q
0
)
+
(
R
P
0
+
X
Q
0
)
2
=
(
R
2
+
X
2
)
(
P
0
2
+
Q
0
2
)
{\displaystyle {\frac {1}{4}}E^{4}-E^{2}\left(RP_{0}+XQ_{0}\right)+\left(RP_{0}+XQ_{0}\right)^{2}=\left(R^{2}+X^{2}\right)\left(P_{0}^{2}+Q_{0}^{2}\right)}
tj.:
1
4
E
4
−
E
2
(
R
P
0
+
X
Q
0
)
+
R
2
P
0
2
+
2
R
P
0
X
Q
0
+
X
2
Q
0
2
=
R
2
P
0
2
+
X
2
P
0
2
+
R
2
Q
0
2
+
X
2
Q
0
2
{\displaystyle {\frac {1}{4}}E^{4}-E^{2}\left(RP_{0}+XQ_{0}\right)+R^{2}P_{0}^{2}+2RP_{0}XQ_{0}+X^{2}Q_{0}^{2}=R^{2}P_{0}^{2}+X^{2}P_{0}^{2}+R^{2}Q_{0}^{2}+X^{2}Q_{0}^{2}}
tj.:
1
4
E
4
−
E
2
(
R
P
0
+
X
Q
0
)
=
X
2
P
0
2
−
2
R
P
0
X
Q
0
+
R
2
Q
0
2
=
(
X
P
0
−
R
Q
0
)
2
{\displaystyle {\frac {1}{4}}E^{4}-E^{2}\left(RP_{0}+XQ_{0}\right)=X^{2}P_{0}^{2}-2RP_{0}XQ_{0}+R^{2}Q_{0}^{2}=\left(XP_{0}-RQ_{0}\right)^{2}}
tj. pro
P
0
≠
0
{\displaystyle P_{0}\neq 0}
cos
φ
{\displaystyle \cos \varphi }
(
X
−
R
t
g
φ
)
2
P
0
2
+
E
2
(
R
+
X
t
g
φ
)
P
0
−
1
4
E
4
=
0
{\displaystyle (X-R\ tg\varphi )^{2}P_{0}^{2}+E^{2}(R+X\ tg\varphi )P_{0}-{\frac {1}{4}}E^{4}=0}
Dále určíme diskriminant výše uvedené kvadratické rovnice o parametrech
R
,
X
,
E
,
φ
{\displaystyle R,X,E,\varphi }
D
=
E
4
(
R
+
X
t
g
φ
)
2
+
(
X
−
R
t
g
φ
)
2
E
4
=
E
4
Z
2
(
1
+
t
g
2
φ
)
=
E
4
Z
2
cos
2
φ
>
0
{\displaystyle D=E^{4}(R+Xtg\varphi )^{2}+(X-R\ tg\varphi )^{2}E^{4}=E^{4}Z^{2}\left(1+{tg}^{2}\varphi \right)={\frac {E^{4}Z^{2}}{\cos ^{2}\varphi }}>0}
a její kořeny:
P
01
=
−
E
2
(
R
+
X
t
g
φ
)
+
E
2
Z
c
o
s
φ
2
(
X
−
R
t
g
φ
)
2
=
E
2
(
Z
−
(
R
c
o
s
φ
+
X
s
i
n
φ
)
)
2
(
X
c
o
s
φ
−
R
s
i
n
φ
)
2
c
o
s
φ
>
0
{\displaystyle P_{01}={\frac {-E^{2}(R+Xtg\varphi )+{\frac {E^{2}Z}{cos\varphi }}}{2(X-R\ tg\varphi )^{2}}}={\frac {E^{2}(Z\ -(Rcos\varphi +Xsin\varphi ))}{2(Xcos\varphi -R\ sin\varphi )^{2}}}cos\varphi >0}
P
02
=
−
E
2
(
R
+
X
t
g
φ
)
−
E
2
Z
c
o
s
φ
2
(
X
−
R
t
g
φ
)
2
=
−
E
2
(
Z
+
(
R
c
o
s
φ
+
X
s
i
n
φ
)
)
2
(
X
c
o
s
φ
−
R
s
i
n
φ
)
2
c
o
s
φ
<
0
{\displaystyle P_{02}={\frac {-E^{2}(R+Xtg\varphi )-{\frac {E^{2}Z}{cos\varphi }}}{2(X-R\ tg\varphi )^{2}}}=-{\frac {E^{2}(Z+(Rcos\varphi +Xsin\varphi ))}{2(Xcos\varphi -R\ sin\varphi )^{2}}}cos\varphi <0}
jejichž vyjádření dává smysl při splnění následujících tří podmínek:
φ
∈
(
−
π
2
,
π
2
)
P
X
≠
Q
R
Z
±
(
R
c
o
s
φ
+
X
s
i
n
φ
)
>
0
{\displaystyle \varphi \in (-{\frac {\pi }{2}},{\frac {\pi }{2}})\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ PX\neq QR\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ Z\ \pm (Rcos\varphi +Xsin\varphi )>0}
přičemž druhý kořen nemá smysl uvažovat, pak limitní pracovní bod
[
P
0
,
U
0
]
{\displaystyle \left\lbrack P_{0},U_{0}\right\rbrack }
P
0
=
E
2
(
Z
−
(
R
c
o
s
φ
+
X
s
i
n
φ
)
)
2
(
X
c
o
s
φ
−
R
s
i
n
φ
)
2
c
o
s
φ
U
0
2
=
Z
P
0
cos
φ
{\displaystyle P_{0}={\frac {E^{2}(Z\ -(Rcos\varphi +Xsin\varphi ))}{2(Xcos\varphi -R\ sin\varphi )^{2}}}cos\varphi \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ U_{0}^{2}={\frac {Z\ P_{0}}{\cos \varphi }}}
tj. uvažujeme-li pouze činnou zátěž při zanedbání odporu, tj.
φ
=
0
{\displaystyle \varphi =0}
R
=
0
{\displaystyle R=0}
P
0
=
E
2
2
X
=
U
0
2
X
U
0
=
X
P
0
=
E
2
{\displaystyle P_{0}={\frac {E^{2}}{2X}}={\frac {U_{0}^{2}}{X}}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ U_{0}={\sqrt {X\ P_{0}}}={\frac {E}{\sqrt {2}}}}
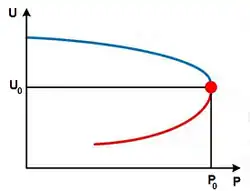
Nosová křivka
Nosová křivka stability napětí při přenosu výkonu vedením elektrizační soustavy. Z výše uvedeného plyne, že pohybuje-li se pracovní bod s rostoucím zatížením vedení zleva doprava po modré části nosové křivky, tak je napětí na konci vedení stabilní, překročí-li však pracovní bod svou limitní pozici, pak se bude pohybovat s klesajícím zatížením vedení zprava doleva po červené části nosové křivky při současném kolapsu napětí na konci vedení (viz obrázek).
Uvažujeme-li
P
X
=
Q
R
{\displaystyle PX=QR}
R
,
X
>
0
{\displaystyle R,X>0}
(
X
−
X
)
2
P
0
2
+
E
2
(
R
+
X
X
R
)
P
0
−
1
4
E
4
=
0
{\displaystyle (X-X)^{2}P_{0}^{2}+E^{2}(R+X{\frac {X}{R}})\ P_{0}-{\frac {1}{4}}E^{4}=0}
tj.:
Z
2
R
P
0
=
1
4
E
2
⇒
P
0
=
R
(
E
2
Z
)
2
⇒
U
0
=
E
2
{\displaystyle {\frac {Z^{2}}{R}}P_{0}={\frac {1}{4}}E^{2}\ \ \ \ \ \Rightarrow \ \ \ \ \ P_{0}=R\ \left({\frac {E}{2\ Z}}\right)^{2}\ \ \ \ \ \Rightarrow \ \ \ \ \ U_{0}={\frac {E}{2\ }}}
kde:
U
0
2
=
Z
P
0
cos
φ
=
(
1
+
t
g
2
φ
)
Z
R
(
E
2
Z
)
2
=
(
E
2
)
2
(
1
+
t
g
2
φ
)
=
Z
R
{\displaystyle U_{0}^{2}={\frac {Z\ P_{0}}{\cos \varphi }}={\sqrt {\left(1+{tg}^{2}\varphi \right)}}\ Z\ R\ \left({\frac {E}{2\ Z}}\right)^{2}=\left({\frac {E}{2\ }}\right)^{2}\ \ \ \ \ \ \ \ \ \ {\sqrt {\left(1+{tg}^{2}\varphi \right)}}={\frac {Z}{R}}}
Odkazy
Reference
Související články
Externí odkazy