Elektroenergetická soustava obsahuje několik generátorů pracujících do soustavy za všech provozních podmínek. Za normálních provozních podmínek generátory pracují vzájemně synchronně, tj. relativní poloha osy rotoru generátoru a osy elektromagnetického pole statoru je pevná. Úhel mezi těmito polohami se nazývá zátěžný úhel. Během jakékoli změny elektromagnetickéhomomentu pole statoru rotor zpomaluje nebo zrychluje vzhledem k synchronně rotující magnetomotorické síle ve vzduchové mezeře mezi rotorem a statorem, čímž vytváří relativní pohyb zátěžného úhlu. Rovnice popisující tento pohyb se nazývá rovnice kývání (kmitání), což je obyčejnálineární diferenciální rovnice s konstantními koeficienty druhého řádu.[1] Předávání mechanického a elektrického výkonu mezi rotorem a sítí v důsledku kývání rotoru (zrychlení a zpomalení) je způsobeno setrvačnou odezvou rotoru turbosoustrojí.
Rovnice a řešení
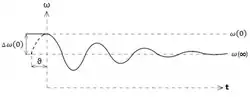
Pro úhlovou rychlost, kolísající okolo své ustálené hodnoty a jí příslušný zátěžný úhel:
zapišme pohybovou rovnici (D' Alembert) otáčející se hřídele synchronního turbosoustrojí:
pak nám řešení rovnice s pravou stranou přejde do tvaru:
tj.:
Uvedené řešení pohybové rovnice je platné za podmínky při nárůstu () malého zátěžného úhlu a v kterém představuje úhlovou frekvenci kývání rotoru.
Odkazy
Reference
↑GRAINGER, John J.; STEVENSON, William D. Power system analysis. [s.l.]: McGraw-Hill, 1 January 1994. Dostupné online. ISBN978-0-07-061293-8. S. 700-702.Je zde použita šablona {{Cite book}} označená jako k „pouze dočasnému použití“.